
随着机器视觉行业发展,控制系统对视觉系统的要求也在不断提高,传统的单目视觉系统由于只能获取到二维数据,很难满足现在越来越复杂的工业环境检测和研究要求,三维立体信息获取是机器视觉未来发展的必然道路。而基于双目视觉技术的三维信息检测具有成本低、结构简单、鲁棒性好的特点,拥有非常重要的应用研究价值,受到行业内广泛关注,可应用在立体三维测量、视觉跟踪、三维还原等多方面,并且结合其他传感器技术,可拓展到更多的应用领域。
MV-VS220-A双目立体视觉系统开发平台是维视图像公司自主研发,通过模拟人眼视觉,利用“视差”原理计算被测对象三维坐标的立体视觉系统。双目立体视觉系统利用两个相机从不同角度观测同一区域,在获取平面信息的同时还可获取深度信息,获得空间点X、Y、Z三维坐标,为更深入的研究获取准确的数据。目前基于双目视觉的应用几乎涵盖了各个行业,其中尤其以机器人定位、体积测量、体感游戏、空间跟踪等应用尤多。而未来基于立体视觉的智能驾驶、VR设备、智能机器人、拟人化机器人等都或多或少地涉及到了这方面的技术。

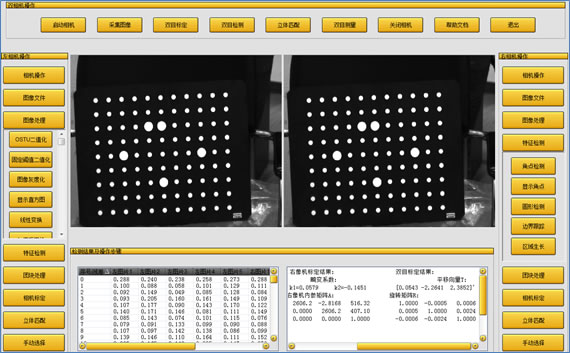
核心技术包括图像预处理、单目标定、双目标定、立体匹配、目标特征识别等,为双目立体视觉系统扩展研究提供准确的空间三维数据,并结合高校科研单位的特殊应用需求,具有以下特点:
系统开放——可依据实际应用条件的不同,针对性调节相机夹角、基线距离等参数。并能实时标定双目系统在对应条件下的内参矩阵、平移向量、旋转矩阵等。
库函数功能完善——配套的CCAS软件,涵盖图像获取、标靶识别、单双目标定、立体匹配、图像预处理、三维姿态测量等功能
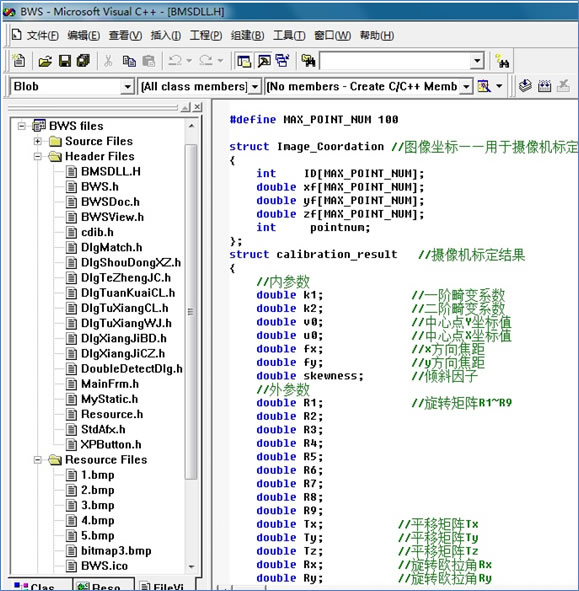
二次开发接口丰富——工业相机、CCAS双目软件均提供二次开发包及库函数调用源码,用户可根据自己的需要添加自己的算法
系统配置自由——相机可自由更换维视全系列工业相机,分辨率涵盖30万像素~2900万像素,满足不同检测环境

基于双目视觉技术的游戏外设

机器人导航


